关于选拔

选型举例:M215-AS04BB表示M215系列伺服驱动器,电源电压AC220V,单轴输出 方式,功率400W,控制类型为基本型,编码器类型为串行通讯型。
注:1、控制型为基本型。基本型包括USB通讯、Modbus、指令脉冲输入等功能。 2、电源电压AC220V:功率可选范围400~2000W。M215 系列伺服驱动器可配套M205系列伺服电机。
表 1:功率
| 代码 | 04 | 08 | 15 | 22 | 30 |
| 力量 | 400W | 750W | 1500W | 2200W | 3000W |
| 额定电流 | 2.8A | 5A | 6A | 8.4A | 12.5A |
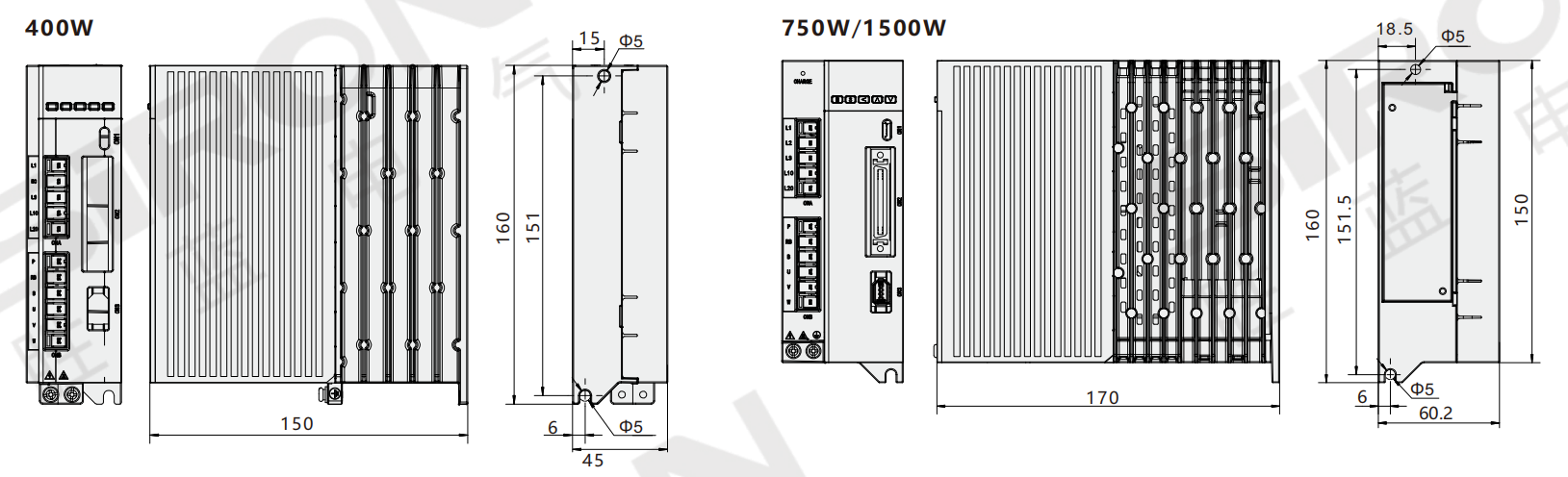
规格
| 姓名 | M215系列伺服驱动器 | ||
| 输入功率 | 主电路电源 | 三相AC220~240V(-15~+10%,50~60Hz) | |
| 控制电源 | 单相AC220~240V(-15~+10%,50~60Hz) | ||
| 额定电流 | 0.4kW/2.8A,0.75kW/5.0A,1.0kW/6.0A,1.5kW/8.4A | ||
| 编码器反馈 | 一次一个接地室,ACT500V,耐压1分钟(漏电触发 电流20mA)(200V系列) | ||
| 编码器反馈 | 第一个代码 | 万线 增量 编码器 17bit;23 位 绝对值 | |
| 使用条件 | 使用环境温度 | -5~+45℃(不 结冰) | |
| 保存环境温度 | -20~+85℃ | ||
| 使用/储存湿度 | 95%RH 以下(无 结冰 、 凝露) | ||
| 抗振性 | 5.88m/s以下2,10至60Hz(不能在谐振频率下连续使用) | ||
| 冲击强度 | 19.6m/秒⊃2; | ||
| 高度 | 1000m以下距离可正常使用。距离1000~2000m时, 请减少容量使用 | ||
| IO接口连接器 | 数字信号 | 输入 输出 | 有7个通用输入通道。根据参数选择万能输入的功率 |
| 有4个通用输入通道。根据参数选择万能输出的功能 | |||
| 模拟信号 | 进入 | 2 12位 A /D 通道 ,±10V | |
| 脉冲信号 | 进入 | 2 输入;最大差分输入为4Mpps,脉冲宽度不得小于0.125us。光耦输入 最大500Kpps,脉宽不小于1us(分别支持5V输入和24V输入) | |
| 输出 | 4 输出; A、B、Z相位差输出; Z相集电极开路输出 | ||
| 通讯功能 | USB(C型) | 可连接电脑进行参数设置、状态监控等 | |
| MODBUS | PLC 1:n 通讯,支持 Modbus-RTU 和 ASCII 模式,波特率范围 400bps 至 230400bps 可设置 | ||
| 前面板 | 5 位按键和 6 位 LED 显示屏 | ||
| 制动电阻 | 内置制动电阻(也可外置) | ||
| 动态制动 | 内置 | ||
| 控制方式 | ①位置控制,②速度控制,③扭矩控制,④位置/速度控制,⑤位置/扭矩控制,⑥速度/扭矩控制;六种控制模式可根据参数切换 | ||
| 普遍的 | 自动调整 | 在电机驱动状态下,通过上层的动作指令和安装调试软件Master发出的动作指令,实时推断确定负载惯量,并 自动设置与刚度设置相对应的增益 | |
| 反馈脉冲分频功能 | 脉冲数可任意设定(不超过编码器反馈脉冲数)。 | ||
| 保护功能 | 硬件错误 | 过压、欠压、超速、过载、过流、编码器异常等 | |
| 软件错误 | 位置偏差过大、指令脉冲分频、EEPROM异常等 | ||
| 报警数据追踪功能 | 报警数据历史记录可查阅 | ||
| 无限选择绝对函数 | 可实现绝对值编码器多圈数据上限值设置功能 | ||
| 位置控制 | 脉冲输入 | 最大 指令脉冲频率数 | 500K脉冲/秒(光耦输入);4M脉冲/秒(差分输入) |
| 输入puse的形式 信号 | 光耦输入或差分输入,输入类型和形式可根据参数选择(①正向/反向,②A相/B相,③指令+方向) | ||
| 平滑滤波器 | 指令输入可选择一次性延时滤波器或FIR型滤波器 | ||
| 模拟输入 | 扭矩限制 指令输入 | 每个方向的扭矩限制可单独设置 | |
| 扭矩 前馈输入 | 可根据模拟电压输入扭矩前馈 | ||
| 振动控制 | 最多可同时使用 4 个 | ||
| V型阻尼过滤器 | 最多可同时使用 1 个 | ||
| 2个自由度 | 可用的 | ||
| 负载波动抑制控制 | 可用的 | ||
| 位置比较输出功能 | 可用的 | ||
| 速度控制 | 控制输入 | 内部指令速度选择:1.内部指令速度选择,2.内部指令速度选择,3.零速阻尼等 | |
| 控制输出 | 速度到达等 | ||
| 模拟输入 | 速度指令 输入 | 可根据模拟电压调节输入速度 | |
| 扭矩限制 指令输入 | 每个方向的扭矩限制可单独设置 | ||
| 扭矩前馈输入 | 可根据模拟电压输入扭矩前馈 | ||
| 内部速度指令 | 可根据控制输入切换八种内部速度 | ||
| 软启动/掉电功能 | 每1000r/min 0~10秒。加减速度单独设定 | ||
| 零速钳位 | 根据零速钳位输入,可将内部速度指令固定为0 | ||
| 2个自由度 | 可用的 | ||
| 负载波动抑制控制 | 可用的 | ||
| 位置比较输出功能 | 不可用 | ||
| 扭矩控制 | 控制输入 | 零速钳位、扭矩指令符号输入等 | |
| 控制输出 | 速度到达等 | ||
| 模拟输入 | 扭矩 指令输入 | 可根据模拟电压输入扭矩指令 | |
| 2个自由度 | 不可用 | ||
| 负载波动抑制控制 | 不可用 | ||
| 位置比较输出功能 | 不可用 | ||
应用
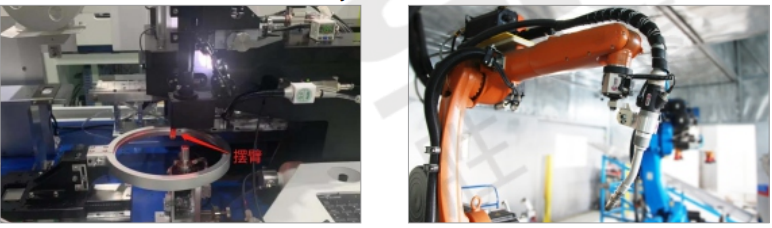
半导体行业的应用
在机械臂上的应用
方面
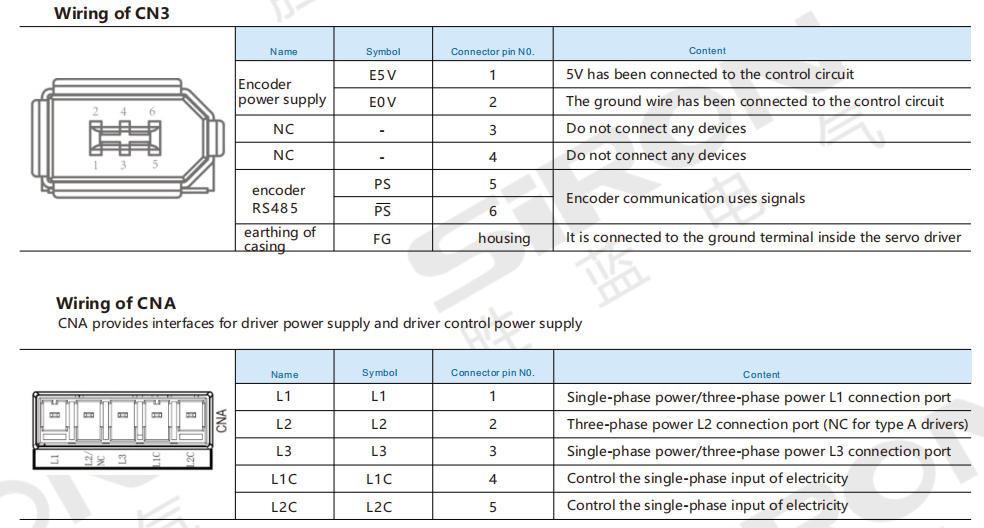
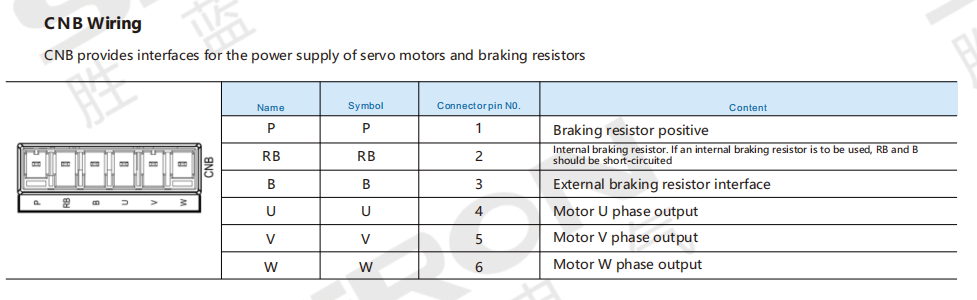
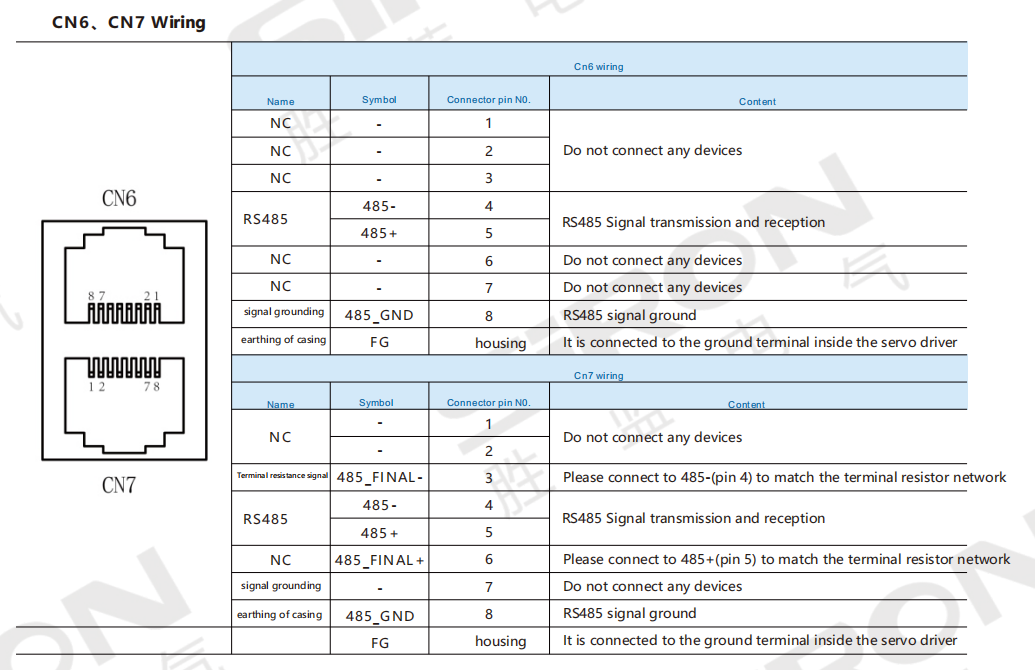
接线图
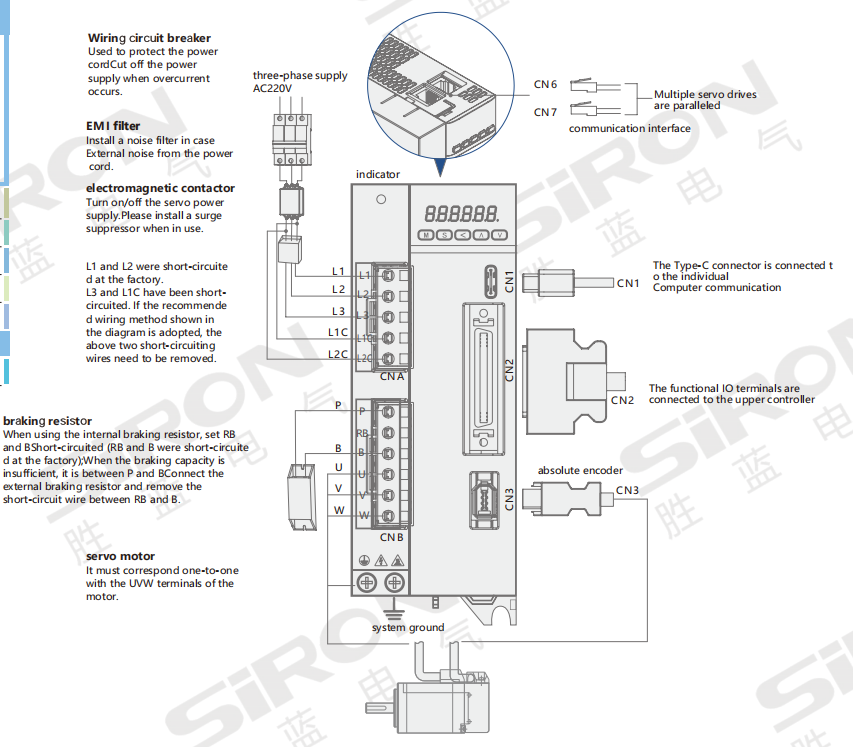
伺服系统端子定义