关于选拔
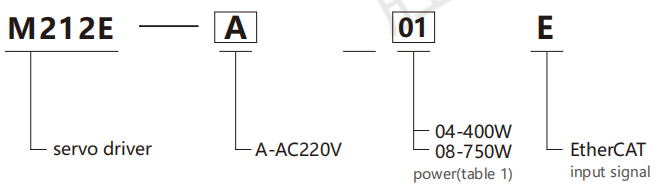
选型示例:M212E-A01E代表M212E系列伺服驱动器,电源电压为AC220V,功率为100W,输入信号为EtherCAT。
注:1、电源电压AC220V:功率可选范围100~1000W。 M212E系列伺服驱动器 可与M202系列伺服电机配套。
表 1:功率
| 电压 | 交流220V | |||||
| 代码 | 01 | 02 | 04 | 06 | 08 | 10 |
| 力量 | 100W | 200瓦 | 400W | 600W | 750W | 1000W |
规格
| 姓名 | M212E系列伺服驱动器 | |
| 输入功率 | 单相 AC220V | |
| 控制方式 | 位置脉冲模式、内部寄存器位置模式、模拟量速度模式、 内部寄存器速度模式、模拟量扭矩模式、内部寄存器扭矩 模式、混合控制模式等 | |
| 控制特性 | 电机类型 | 永磁同步电机 |
| 速度响应频率 | 1.2KHz | |
| 速度波动性 | 0.01%(负载 0~100%) | |
| 减速带 | 0.01%(负载 0~100%) | |
| 速比 | 1:10000 | |
输入脉冲频率 | 1、500KHz(差分式)200KHz(集电极开路) 2、高速脉冲电路接收频率为4MHZ(差分式)。 | |
| 输入信号 | 控制输入 | 伺服使能、报警复位、指令脉冲清除、指令脉冲禁止、正转 禁止、正转扭矩限制、反转扭矩限制、内部速度选择 、内部位置触发、原点恢复触发、零速钳位等 |
| 输出信号 | 控制输出 | 伺服就绪、伺服报警、位置到达、速度到达、电瓶抱闸输出、旋转检测 、中间速度限制、原点位置、中间扭矩限制 |
| 编码器信号分频输出 | 三种输出方式:1、编码器Z相集电极开路输出2、 编码器A、B相分频信号差分输出(无隔离) 任意分频3、Z脉冲时间扩展功能 | |
| 位置控制 | 输入法 | 两相正交脉冲、正转脉冲+反转脉冲、脉冲+方向 、内部寄存器 |
| 电子齿轮比 | 1、0.01≤B/A≤100002。支持两组电子档位,用户可 根据实际需要选择或切换 | |
| 模拟速度控制 | -10V~+10V范围内的模拟量速度、扭矩信号输入可通过 功能码设定范围。指令来源可选 | |
| 模拟扭矩控制 | ||
| 减速度 | 参数设定:加减速时间:1~30,000ms(从0到额定速度) | |
| 信号通讯 | MODBUS和RS485接口可连接PC机设置和监控伺服控制 参数 | |
| 参数 设置 | 键盘输入 | 参数设定:加减速时间:1~30,000 ms(从O到额定速度) |
| 上位机设置 | 通过RS485通讯接口运行上位机软件设置驱动器参数 | |
| 监控功能 | 主电源包括输出电流、母线电压、电机转速、电机反馈脉冲、电机反馈速度、给定脉冲、给定脉冲误差、给定速度、给定扭矩、模拟量速度给定、模拟量扭矩给定等 | |
| 保护功能 | 过压、欠压、过载、过流、编码器异常、速度误差过大、脉冲控制指令异常、急停、驱动器过热、主电路电源缺相、再生制动异常、位置控制误差过大、锂电池报警等 | |
| 适用负载惯量 | 小于伺服电机惯量的三倍 | |
| 速度模式 | 软启动时间 | 0~30秒(加速时间和减速时间可分别设定) | |
| 输入信号 | 输入电压 | DC±10V/额定转速(出厂默认设置,可通过功能码更改) | |
| 输入阻抗 | 约50K | ||
| 电路时间参数 | 约52us | ||
| 位置模式 | 表现 | 前馈 补偿装置 | 0~100%(设置分辨率为1%) |
| 定位精度 | 1个指令单元 | ||
| 输入信号 | 脉冲形状 | 从“方向+脉冲”、“90°相位差正交脉冲”、“正向脉冲+反向脉冲”中选择任意一种 | |
| 输入表格 | 差分输入、集电极开路输入 | ||
| 输入脉冲频率 | 1.光耦输入差分驱动:最大500KHZ;集电极驱动:最大200KHZ;2.差分芯片输入:最大4MHZ | ||
| 电子齿轮 | 0.01≤B/A≤10000 | ||
| 输出信号 | 输入表格 | A相、B相、Z相:差动驱动输出,Z相集电极开路输出 | |
| 频分比 | 可任意分频(Z相不可分频) | ||
| 控制信号 | 亲爱的脉冲指令 | 偏差脉冲可通过外部信号清除 | |
| 内置电源 | +24V(100mA负载能力) | ||
| 扭矩模式 | 输入信号 | 输入电源 | DC±10V/额定扭矩(出厂默认设置,可通过功能码更改) |
| 输入阻抗 | 约50K | ||
| 电路参数 | 约52us | ||
应用

激光切割与焊接的应用
在机械臂上的应用
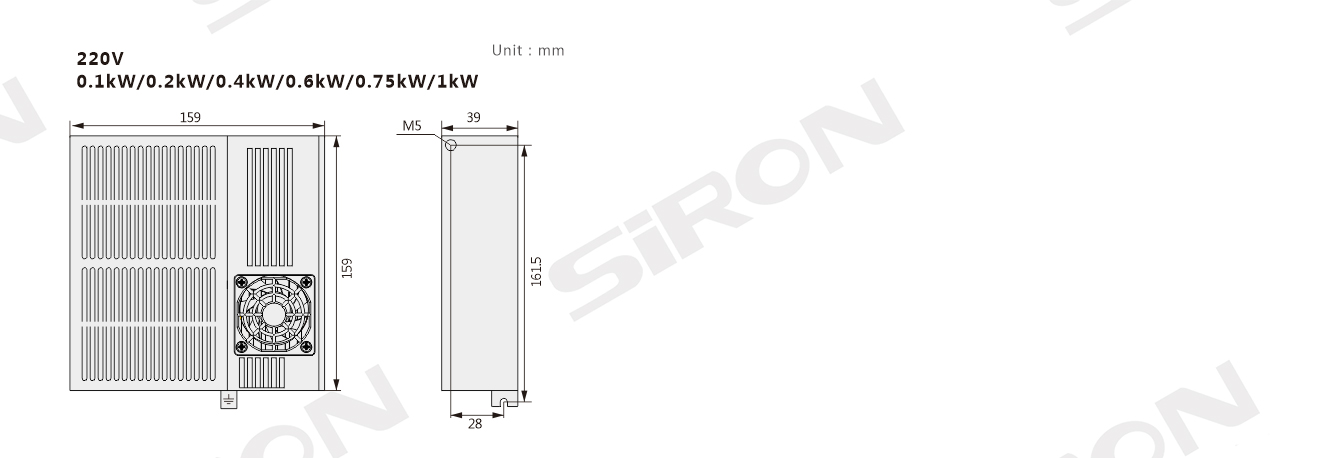
外形图
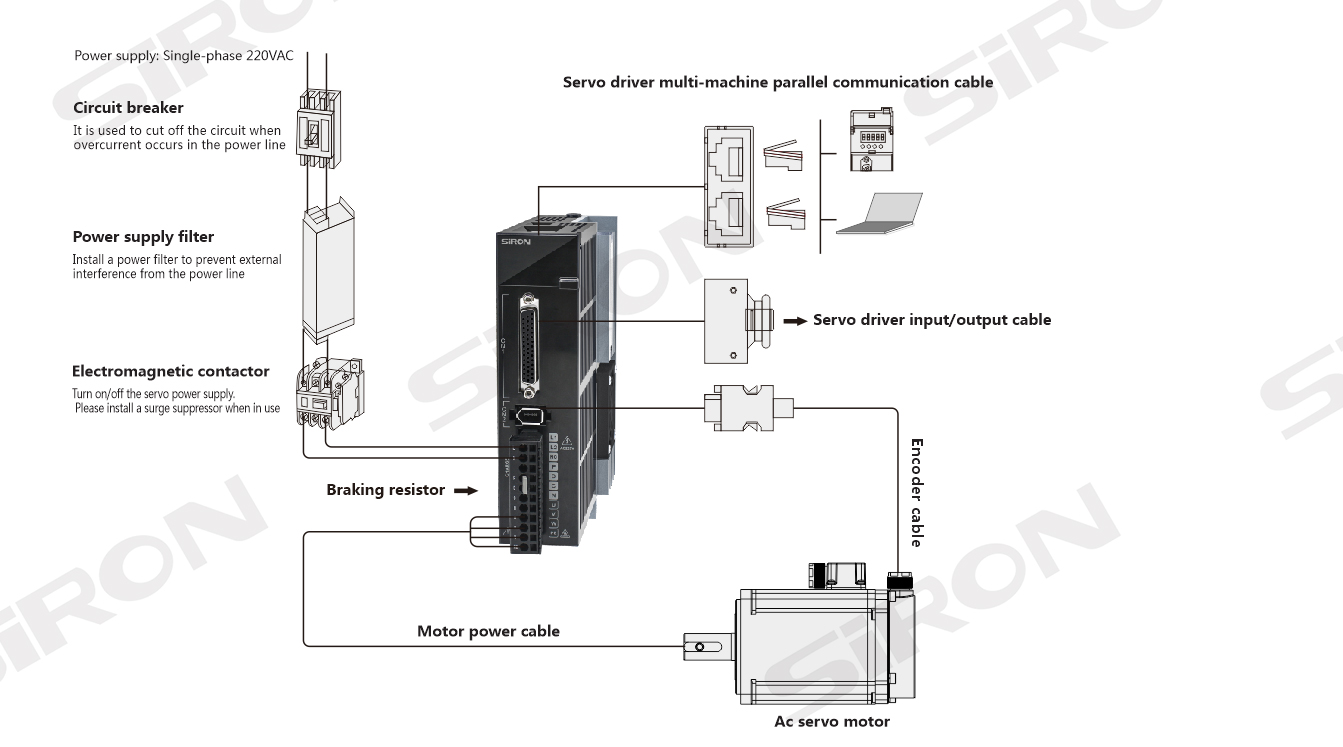
接线图